Botsley's Decision Making
Botsely's decision making process utilized a hierarchical events and services framework which allowed various state machines to respond to posted events within a larger state machine.
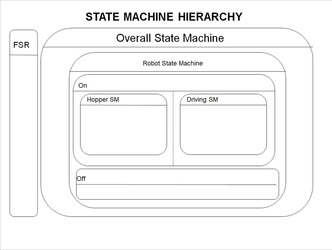
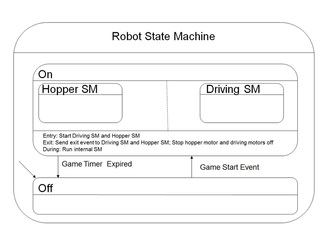
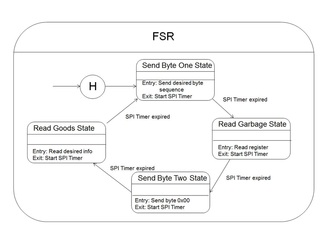
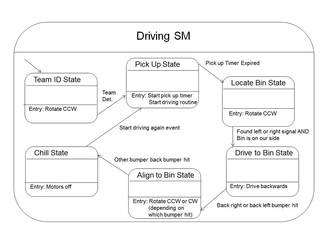
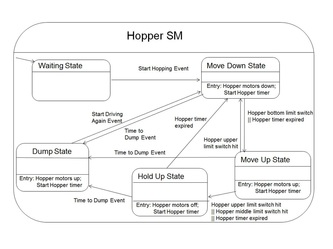
The Robot state machine controls both the hopper and the driving state machine, both of which are parallel to each other. Our team's Master state machine controls the Robot state machine, in parallel with the state machine handling events from the Field Status Reporter, or FSR. The FSR state machine responds to the incoming information and status updates from the field's FSR. This allows Bosley to be smart about which bins he tries to deposit ping pong balls into. The Robot state machine controls both the hopper and the driving state machine, both of which are parallel to each other. The Hopper state machine controls when Botsley decides to use his ball hopper to pick up ping pong and also controls the dumping function of the hopper. The Driving state machines gives Botsley various driving instructions depending on where he is and his task at hand.
The Robot state machine controls both the hopper and the driving state machine, both of which are parallel to each other. Our team's Master state machine controls the Robot state machine, in parallel with the state machine handling events from the Field Status Reporter, or FSR. The FSR state machine responds to the incoming information and status updates from the field's FSR. This allows Bosley to be smart about which bins he tries to deposit ping pong balls into. The Robot state machine controls both the hopper and the driving state machine, both of which are parallel to each other. The Hopper state machine controls when Botsley decides to use his ball hopper to pick up ping pong and also controls the dumping function of the hopper. The Driving state machines gives Botsley various driving instructions depending on where he is and his task at hand.
Code Listing
| PseudoCode Files
| ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
