Coming Up with a Strategy
As soon as we got the rules to HIPPOS, we sat down for some strategy brainstorming meetings. Our initial strategy was to drive around our side of the field for the first three quarters of the game (about a minute and 30 seconds) and pick up as many balls as possible. Then, with 30 seconds left, our 'bot would find the best bin for dumping, head to it, dump into it, and then 'defend' it by latching on and not letting go. Here's how we planned to accomplish this:
Finding Bins:
We liked the idea of being able track IR beacons with a moving turret, and we designed a turret with two parallel IR phototransistors to 'lock on' to a beacon of the desired frequency: If the right side IR detector lost the signal, the turret would move right to recover it, and vice versa. We decided to put this turret on a stepper motor so we could rotate it continuously and still keep track of position.
Picking up Ping-Pong Balls:
We had a few concepts in mind and split up to prototype them. Our initial ideas included a paddle wheel, a continuously friction based intake that would roll over balls, and another intake consisting of two vertical rollers that would 'shoot' balls up a ramp into a storage bin.
When we reconvened to show and tell prototypes, the one we decided to move forward with was a series of elastic strings set about 1" apart which could function as a 'hopper' like the ones used to pick up tennis or golf balls.
Dumping in Bins:
Like most other teams, we intended to have a large reservoir for ping-pong balls with a gate that would drop when we were aligned with a bin.
Sensing Location:
We hoped to rely on our IR Turret to have a sense of where we were facing, and incorporate this information into a dead reckoning system based on the encoders in our 'bot's DC motors. We also expected to need some bump sensors to verify that we were at the wall when it was time to dump balls in the bin.
Finding Bins:
We liked the idea of being able track IR beacons with a moving turret, and we designed a turret with two parallel IR phototransistors to 'lock on' to a beacon of the desired frequency: If the right side IR detector lost the signal, the turret would move right to recover it, and vice versa. We decided to put this turret on a stepper motor so we could rotate it continuously and still keep track of position.
Picking up Ping-Pong Balls:
We had a few concepts in mind and split up to prototype them. Our initial ideas included a paddle wheel, a continuously friction based intake that would roll over balls, and another intake consisting of two vertical rollers that would 'shoot' balls up a ramp into a storage bin.
When we reconvened to show and tell prototypes, the one we decided to move forward with was a series of elastic strings set about 1" apart which could function as a 'hopper' like the ones used to pick up tennis or golf balls.
Dumping in Bins:
Like most other teams, we intended to have a large reservoir for ping-pong balls with a gate that would drop when we were aligned with a bin.
Sensing Location:
We hoped to rely on our IR Turret to have a sense of where we were facing, and incorporate this information into a dead reckoning system based on the encoders in our 'bot's DC motors. We also expected to need some bump sensors to verify that we were at the wall when it was time to dump balls in the bin.
Our first Concept
A Tale of 2,000 Prototypes

After our first concept, we successfully prototyped a hopper and built 4 more versions for a total of 5 different embodiments (several of which we built twice) of Botsley:
First, we moved the hopper pivot from our first concept (see video above) to the inside of Botsley. We built his body as a bottomless box to add easy access to the hopper. We demonstrated direct drive with Maxon motors and acrylic wheels covered with rubber bands for friction.Next, we worked on integrating the drive drain. We planned a timing belt drive train with the Maxon motors in the back of Botsley and the wheels near his front. On top, we mounted the stepper motor near the center of the drive wheel base.
First, we moved the hopper pivot from our first concept (see video above) to the inside of Botsley. We built his body as a bottomless box to add easy access to the hopper. We demonstrated direct drive with Maxon motors and acrylic wheels covered with rubber bands for friction.Next, we worked on integrating the drive drain. We planned a timing belt drive train with the Maxon motors in the back of Botsley and the wheels near his front. On top, we mounted the stepper motor near the center of the drive wheel base.
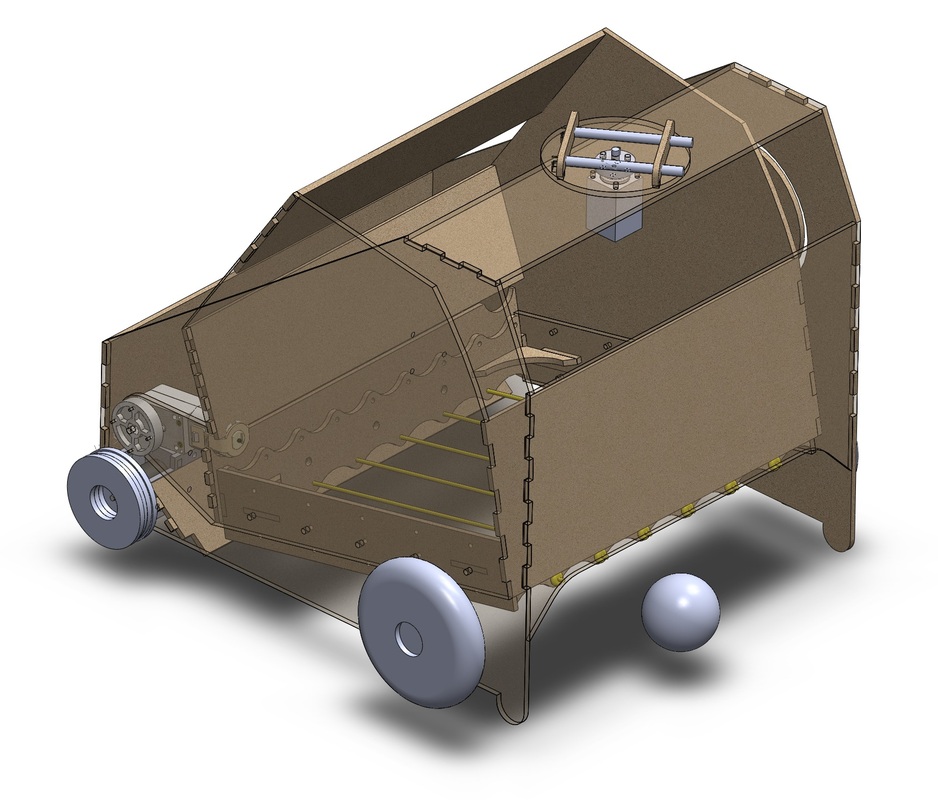
Botsley version 2, with direct drive of the hopper and a planned timing belt.
We realized we needed a much more robust support system for the timing belt and motors, so we built one. We kept the motor mounts' fore-aft location adjustable so we could tension the timing belts. We also lightened the hopper.
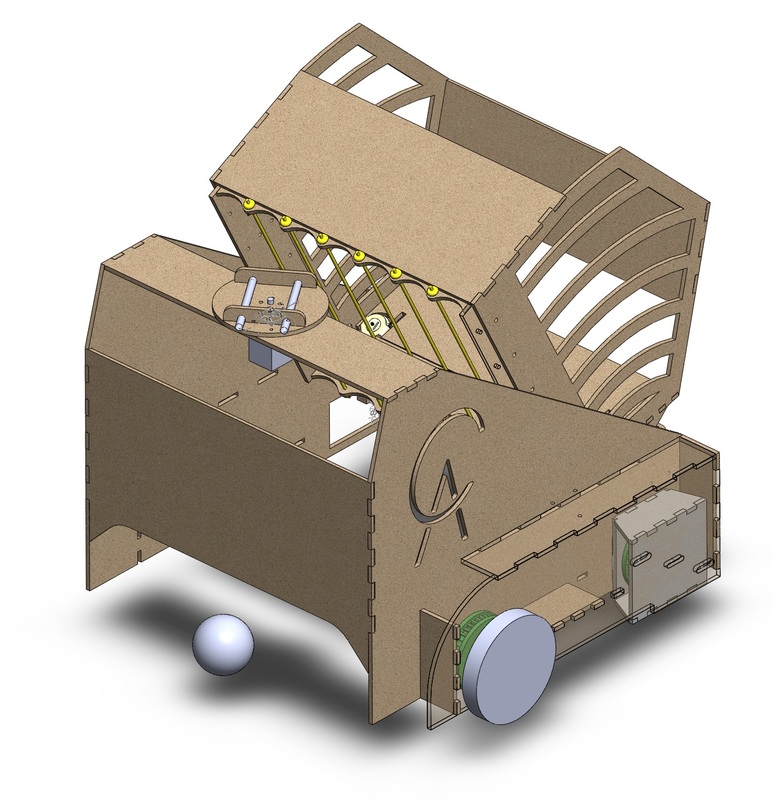
Botsley version 3, with timing belt implemented and hopper lightened.
The lighter hopper failed to lift without a lot of help from elastic with only one week until grading. With a lot going wrong and a realization that we needed to have faith that we were moving forward on the best path, we took a day to prototype several other ball-pickup concepts to see what would be best to bring in. These included a rolling hopper and a 'car wash' style ball intake. We compared them with the hopper:
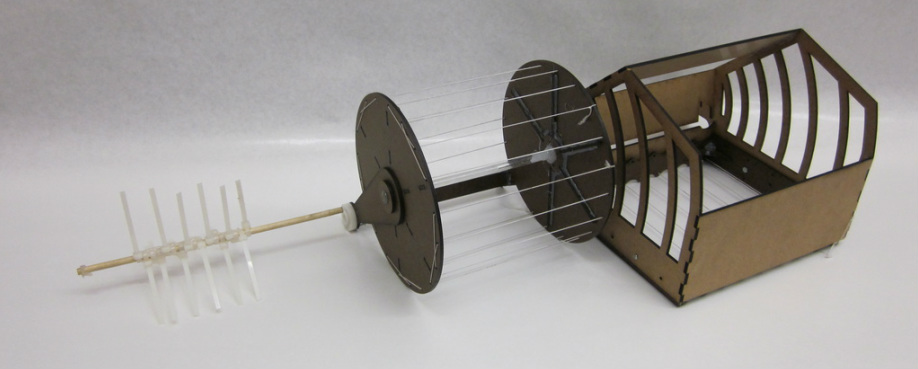
We ultimately decided to stay with the hopper concept, but we redesigned the hopper drastically to use much less torque.
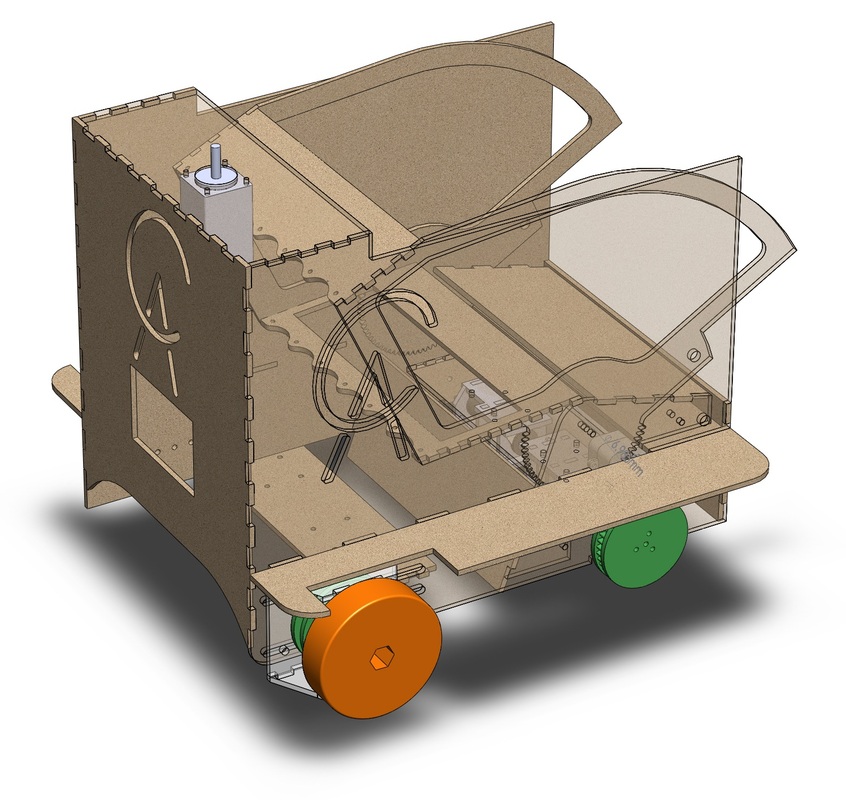
Botsley version 4. Redesigned hopper and a flat U-shaped chassis base to reinforce the 'box' layout.
Competition Day
Finally, we eliminated the timing belts and the stepper motors for Bosley 5.0!
Even though Botsley 5.0 was not thoroughly tested before the night of the competition, he still had a good showing. One of the internal limit switches for the hopper, malfunctioned for the first time and prevented Botsley from driving to a bin due to the hopper blocking the path of the beacon sensor. This mishap unfortunately lead to Botsley being eliminated in the first round.
Below, you can see a video of a successful two minute run.
Even though Botsley 5.0 was not thoroughly tested before the night of the competition, he still had a good showing. One of the internal limit switches for the hopper, malfunctioned for the first time and prevented Botsley from driving to a bin due to the hopper blocking the path of the beacon sensor. This mishap unfortunately lead to Botsley being eliminated in the first round.
Below, you can see a video of a successful two minute run.
